Há muito tempo desejava construir um barco rebocador. Na internet existem vários projetos sobre esse tema. São diferentes modelos para todos os gostos. Eu pretendia construir em uma escala grande, pois assim teria mais espaço no interior do modelo. Afinal, mais espaço significa que dá para embarcar mais coisas, como vários dispositivos eletrônicos.
Uma das coisas que queria fazer era colocar o som de motor a diesel. Pois iria utilizar motor elétrico, mas queria algum grau de realismo na questão sonora. Então busquei desenvolver um pequeno circuito amplificador e um gerador sonoro de motor a diesel. Para fazer isso achei melhor me valer da plataforma Arduino. O resultado é um circuito acionado por meio do acelerador do controle remoto. Ou seja, ao acelerar o motor elétrico, o efeito sonoro também vai sendo incrementado, dando mais realismo.
O rebocador possui também uma chaminé. Em princípio ela seria tão somente decorativa, mas busquei inovar. Então por ela sai também fumaça. É claro que essa fumaça é uma simulação do motor a diesel, pois não tenho nada na embarcação que gere fumaça, como um motor a combustão. Para emular a fumaça fiz várias pesquisas e experiências e acabei ficando com o efeito do nebulizador na água. Trata-se de uma fumaça segura e fácil de repor, pois basta colocar água. Mas sei que alguns colegas geram fumaça de outras formas, como por exemplo, com glicerina (através de aquecimento). Achei minha ideia do nebulizador mais prática e assim segui.
O rebocador que usei para acomodar esses e outros dispositivos foi o Yarra. A planta dele é facilmente encontrada na internet. Seu casco também não possui muitas curvas e por isso é possível fazer com madeira balsa. A vantagem da balsa é que ajuda muito no trabalho. Trata-se de uma madeira leve e boa de trabalhar, fazendo corte, por exemplo. Para colar você pode usar, CA (Super Bonder), cola dois componentes (epóxi) e até mesmo cola de madeira, aquela cola amarela. Falando sobre a cola de madeira (cola amarela), ela se mostra super resistente. A única questão é que sua base é água e por isso em caso de naufrágio existe grande chance do barco se desfazer.
Depois que montar a estrutura utilize massa para madeira e lixa para dar o acabamento final. Aí é só pintar. No caso da pintura meu conselho é por uma tinta fosca. Vai dar um realismo maior ao projeto. Além disso, a tinta fosca ajuda a encobrir possíveis imperfeições. Olha, dá uma olhada nesse vídeo abaixo onde mostro mais detalhes dessa minha construção. Não esquece de deixar seu comentário.
Balsa + Cola + Eletrônica = Barco de Controle Remoto
Desde pequeno sempre fui fascinado por controles remotos. Assim que comecei na eletrônica esse foi o primeiro circuito que me aventurei em fazer. Na época um controle remoto muito simples de 1 único canal. Para controlar várias funções um controle remoto de vários canais é necessário. Porém, sempre mais canais independentes significam maior grau de dificuldade na construção. Minha intenção era construir um controle remoto de pelo menos 4 canais para fazer com que um modelo: acelerasse, desacelerasse, virasse à esquerda e à direita. Não um controle com proporcionalidade, ou seja, iria funcionar com zero ou 100% do comando.
Eu tinha uma planta em tamanho real de uma lancha em PDF. Comprei balsa e com estilete e as plantas montei todas as peças que iria precisar para criar a lanchinha. Olha que o diminutivo aí nem se aplica. O barco tem nada menos que 1 metro de comprimento. Nas imagem abaixo ele ainda não tinha recebido a pintura final. Veja a imagem dele na foto abaixo.
Comparação do tamanho da lancha em relação à raquete ‘mata-mosquito’.
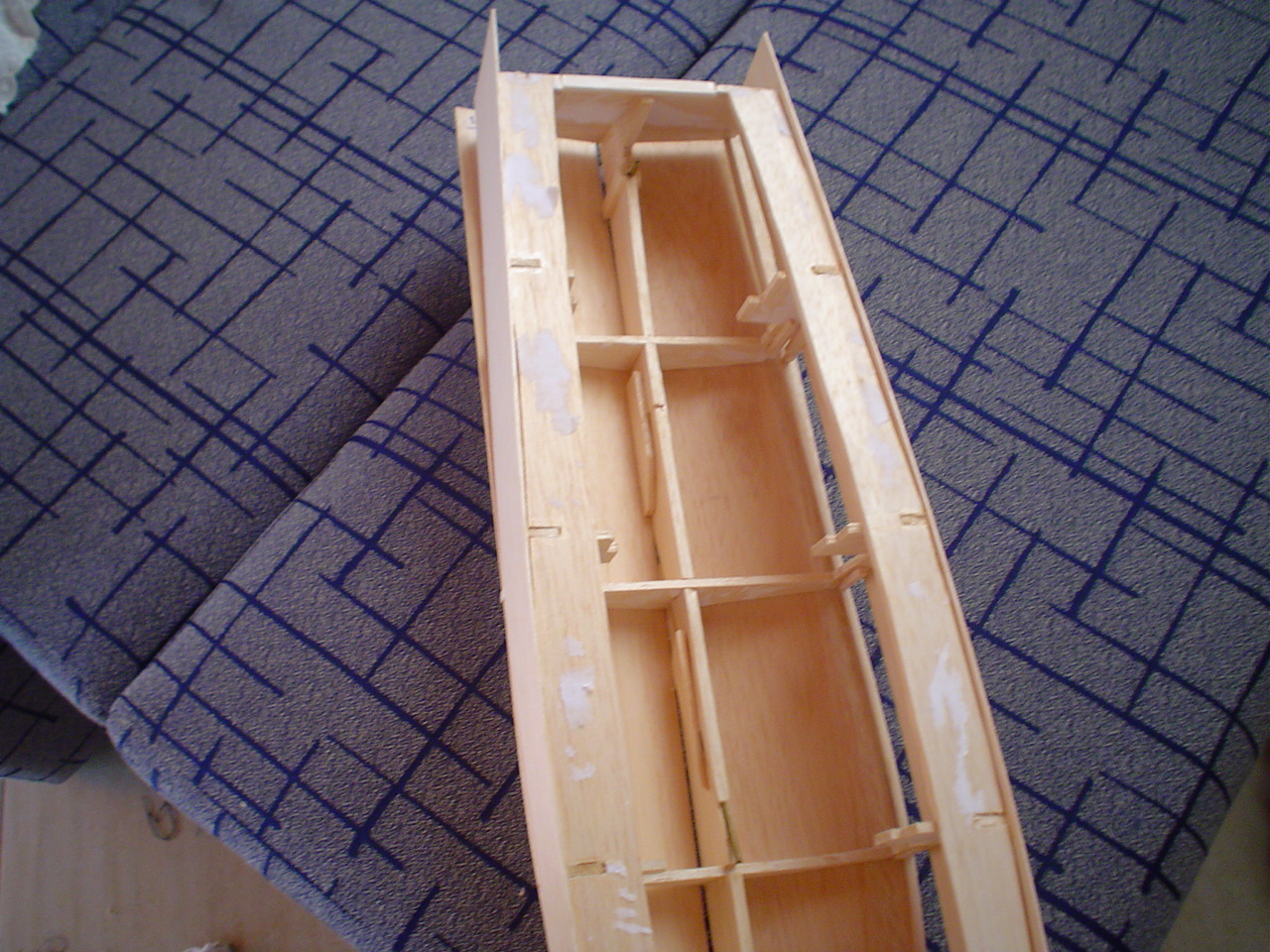
Do projeto original mudei a parte superior – convés. Optei por aumentar o acesso à parte interna da lancha. Minha intenção era tornar mais fácil trabalhar toda a eletrônica no modelo. Veja na foto abaixo que esse acesso superior ocupa quase que toda a extensão do barco.
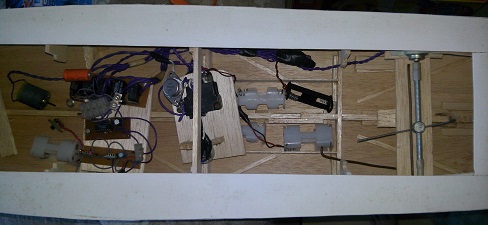
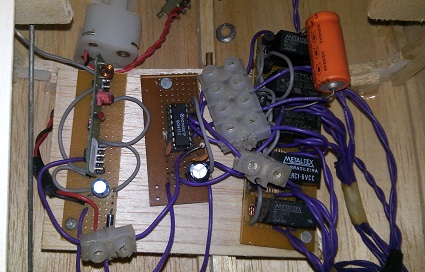
Detalhe dos circuitos internos e o sistema de aceleração da lancha. Tudo ainda fora do lugar.
Na foto acima podemos observar da esquerda para a direita: o motor (ainda não instalado na posição correta), o circuito receptor com os 5 relês, o sistema de aceleração da lancha, as pilhas (precisa de 14 pilhas pequenas), o controle do leme. O motor era escovado e as pilhas todas são necessárias para não haver realimentação de nenhuma parte do circuito, afinal é uma montagem caseira.
Porém como a minha entrada no aeromodelismo, decidi “embarcar” a eletrônica desse, na lanchinha. Acompanhe nas imagens a seguir como foi a etapa de construção da lancha em balsa e também as novas adaptações para receber a eletrônica do aeromodelo.
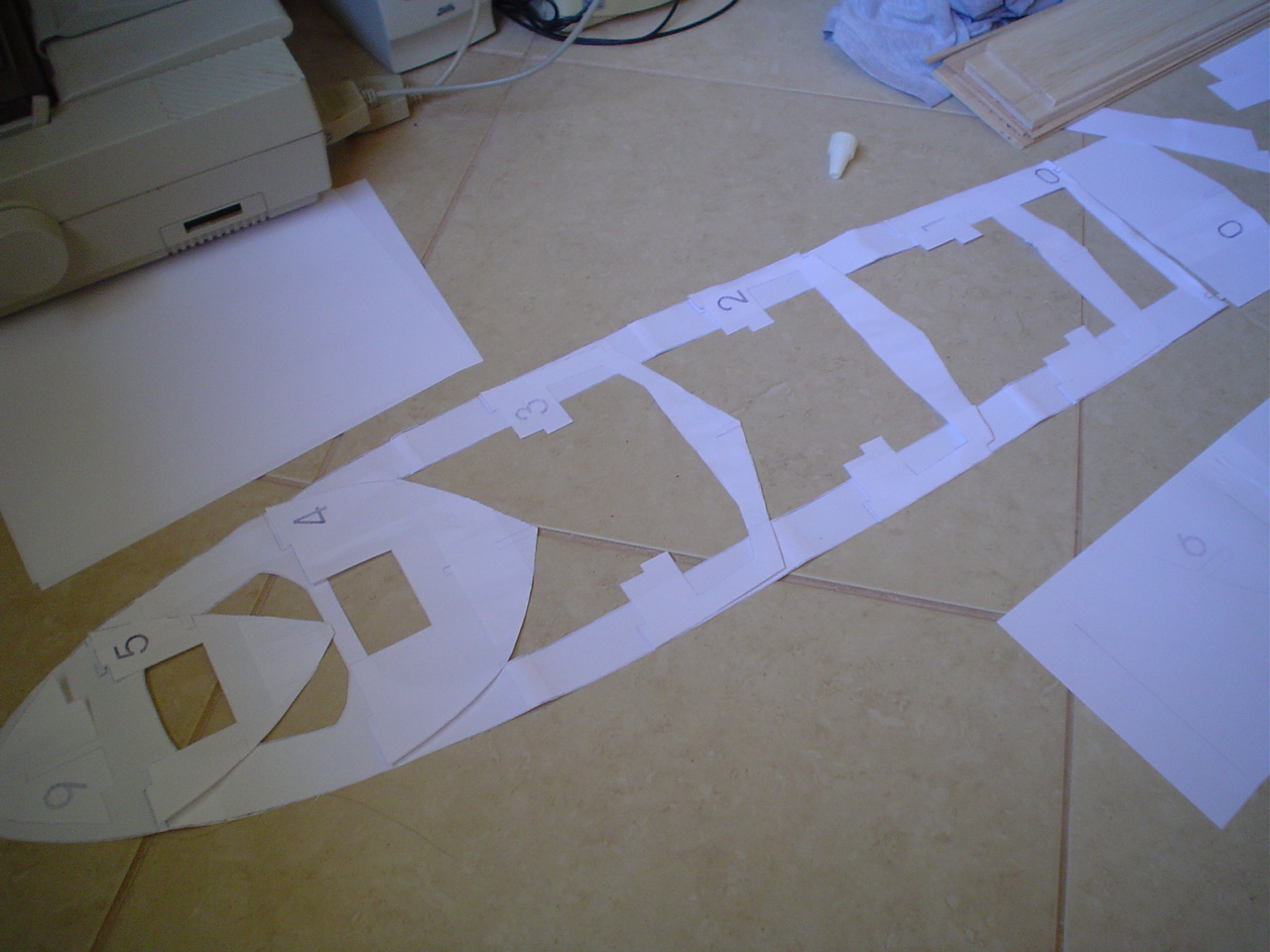
Primeiro fiz a impressão dos moldes da lancha em papel A4 em tamanho real. Colei todos com fita e fui cortando os moldes de papel.
Planta da lancha
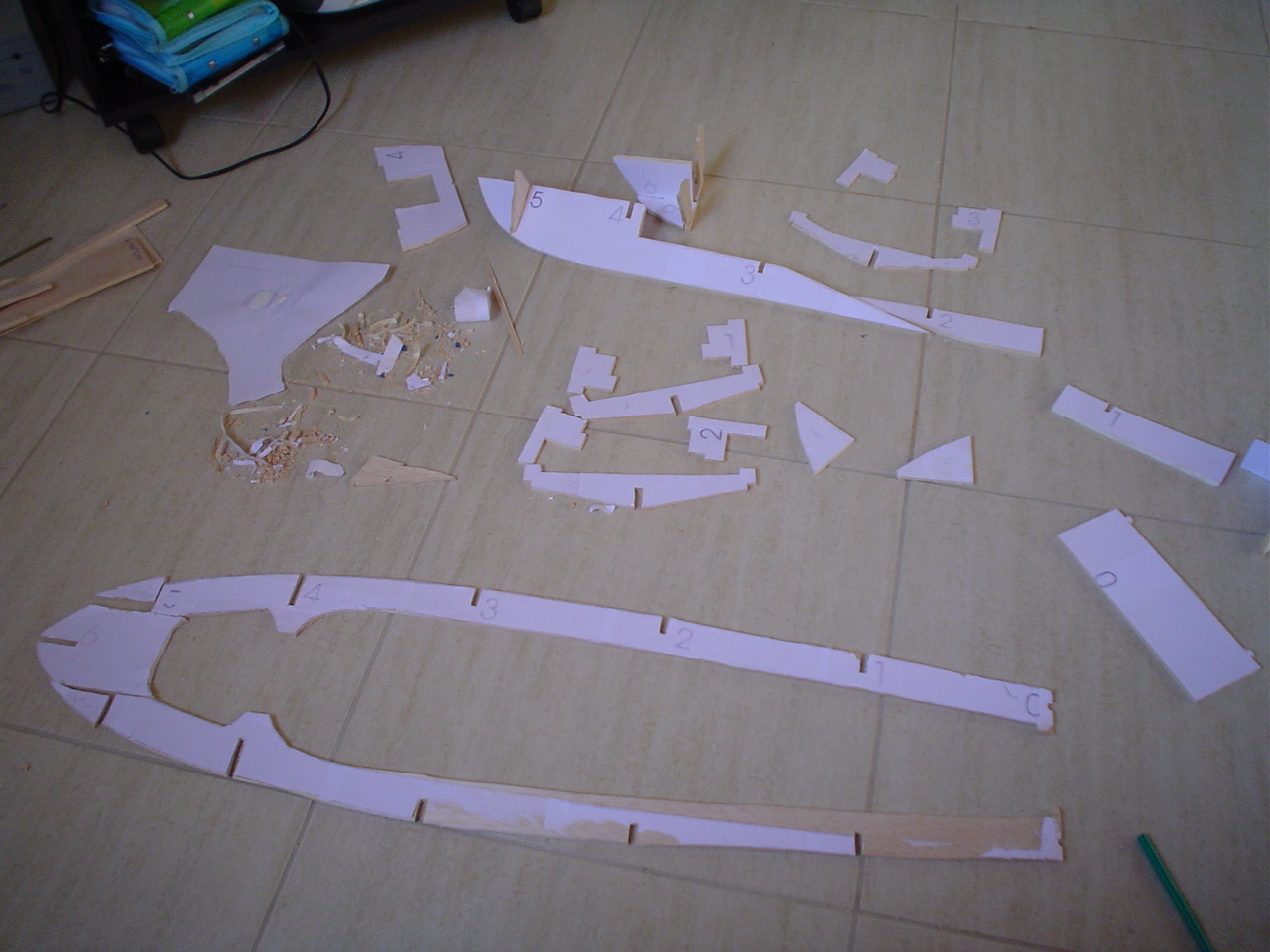
Depois de impressos os papéis, colei os mesmos na balsa para facilitar a precisão do corte. Abaixo as peças de balsa com os papéis colados.
Peças em balsa já cortadas.
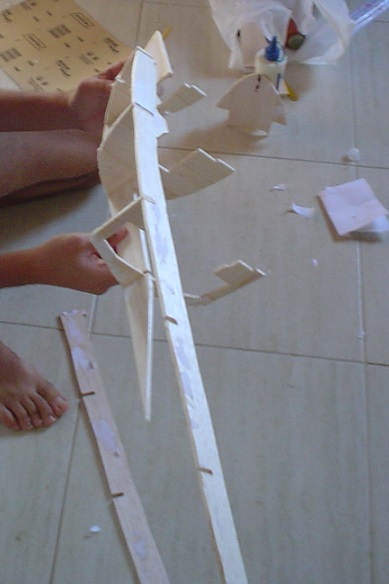
E tá começando a ganhar forma. Essa é a estrutura da proa.
Montando a estrutura.
Aqui o trabalho já estava bem adiantado. Já estava parecendo um barco.
E ela vai tomando forma…
Mais alguns pedacinhos de balsa, cola e o interior vai tomando forma.
Por dentro já tá parecendo um barco.
Abaixo podemos ver a estrutura interna da proa. Nas imagens seguintes essa parte será fechada por cima.
Visão interna da proa.
Mais uma.
Aspecto geral da lancha.
Aqui já estava com o convés encaixado. Mas ainda faltam uns pedacinhos de balsa para fechar tudo.
Aqui com o casco quase terminado e o convés.
Tá perto do final. Aqui a estrutura interna já finalizada. Coloquei mais alguns reforços de balsa que não estavam no projeto original.
Estrutura interna.
E mais 1 foto por outro ângulo.
Mais um ângulo interno.
Agora já está toda fechada. Faltando lixar algumas coisas.
Toda montada.
E olha o tamanho!
Eu e o “filhinho”.
Antes dela ficar branca como na foto abaixo, passei 3 mãos de seladora de madeira e depois uma base branca. Abaixo as partes em amarelo são mais acabamentos em massa.
Agora massa para dar acabamento.
Preparando para a pintura.
Montei uma mini “estufa” na cozinha para poder pintar.
Primeiros jatos de tinta.
Algumas curiosidades do projeto inicial
Na segunda foto desse post é possível ver mais detalhes desse projeto inicial. Vou colocar novamente ela aqui embaixo:
Detalhe do projeto original da lancha. Enquanto ainda estava desenvolvendo o controle remoto, servos e aceleração.
O controle do leme era um parafuso onde em uma ponta instalei um motor. Na outra ponta um rolamento de skate para fazer o parafuso girar livremente. Uma porca corre de um lado para o outro fazendo o leme se movimentar. Agora tem um servo de modelismo.
No projeto inicial tinha optado por não fazer o barco ir para trás. Assim usei 2 canais para acelerar e desacelerar. Fiz um projeto de um reostato cujo potenciômetro é movimentado por uma caixa de redução (uma gambiarra bem feita ehehehhehe). Assim ao girar o motor nos sentidos horário e anti-horário, acelerava ou desacelerava a lancha.
O receptor e transmissor usei como base as placas da Telecontrolli.com. O legal é que elas já são sincronizadas TX com RX. Para dar o número de canais necessários para o projeto fiz uso do circuito integrado Motorola MC145026 e MC145027. Eles são encoder e decoder perfeitos. O trem de pulsos do transmissor é recebido e identificado pelo receptor acionando uma das saídas desse.
Na imagem abaixo podemos ver da esquerda para a direita: módulo receptor (Telecontrolli), C.I. decoder da Motorola, relês usados para: acelerar, desacelerar, virar para a esquerda e direita. O último relê foi usado para cortar a aceleração no caso de perda do sinal do transmissor e não perder a lancha. O alcance máximo ficou em cerca de 50 metros sem barreira nenhuma. Um problema que verifiquei é que quanto maior a distância maior é a latência no comando.
Detalhe do circuito receptor do controle remoto de 5 canais.
Ainda falando em mais detalhes do encoder e decoder da Telecontrolli, veja na imagem abaixo o aspecto interno do transmissor. Usei uma caixa do tipo Patola com 4 push-buttons. A alimentação ficou bem simples já que o módulo funciona bem com 3 Volts (alimentação indicada pelo fabricante). A antena foi montada em função do indicado pela fabricante do módulo TX.
O circuito do controle remoto – Transmissor.
Na imagem abaixo fica mais claro o painel do transmissor com os push-buttons. Coloquei um LED vermelho no centro que acende ao ligar a chave tipo alavanca na parte superior.