
Balsa + Cola + Eletrônica = Barco de Controle Remoto
Desde pequeno sempre fui fascinado por controles remotos. Assim que comecei na eletrônica esse foi o primeiro circuito que me aventurei em fazer. Na época um controle remoto muito simples de 1 único canal. Para controlar várias funções um controle remoto de vários canais é necessário. Porém, sempre mais canais independentes significam maior grau de dificuldade na construção. Minha intenção era construir um controle remoto de pelo menos 4 canais para fazer com que um modelo: acelerasse, desacelerasse, virasse à esquerda e à direita. Não um controle com proporcionalidade, ou seja, iria funcionar com zero ou 100% do comando.
Eu tinha uma planta em tamanho real de uma lancha em PDF. Comprei balsa e com estilete e as plantas montei todas as peças que iria precisar para criar a lanchinha. Olha que o diminutivo aí nem se aplica. O barco tem nada menos que 1 metro de comprimento. Nas imagem abaixo ele ainda não tinha recebido a pintura final. Veja a imagem dele na foto abaixo.

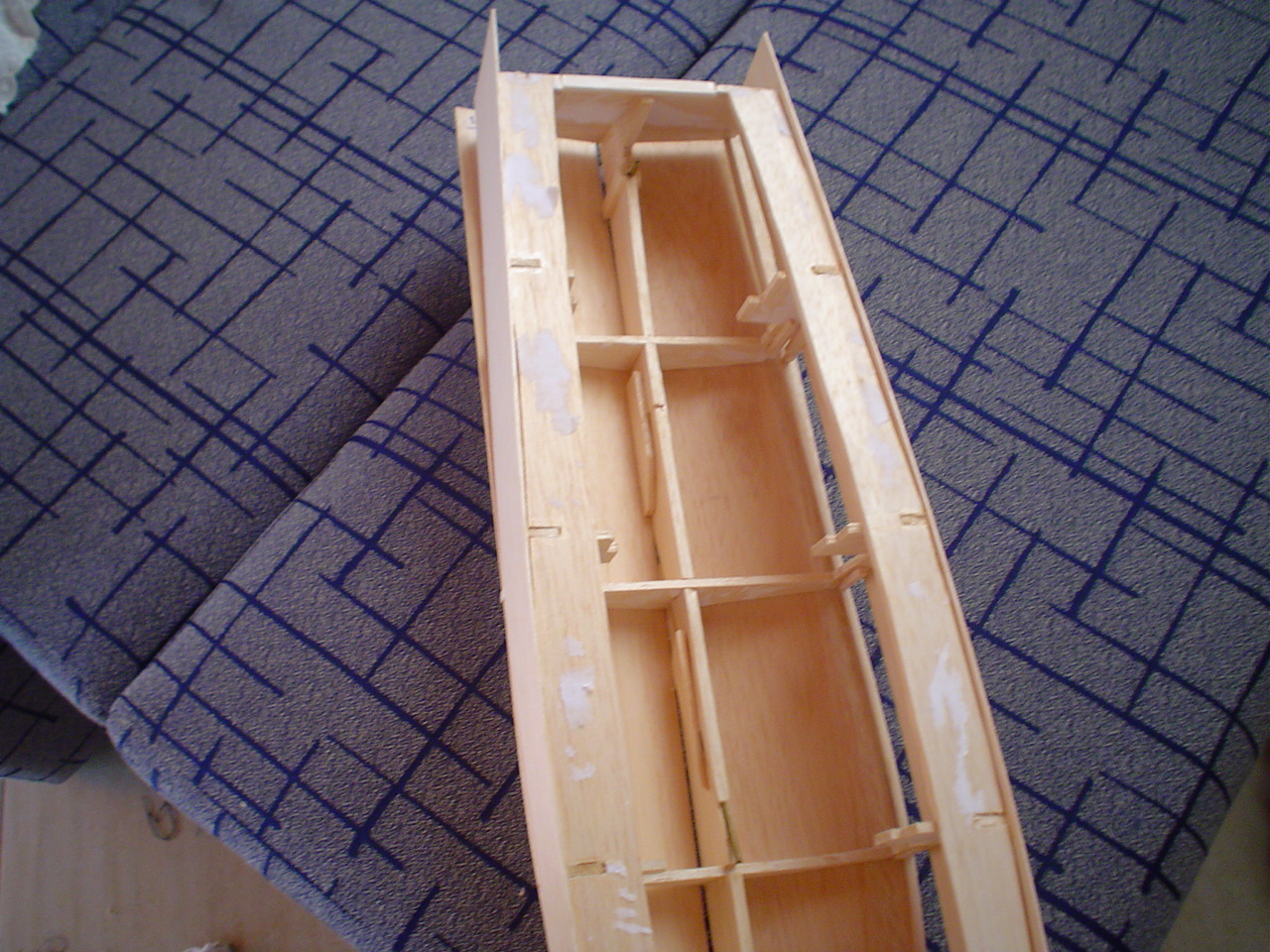
Do projeto original mudei a parte superior – convés. Optei por aumentar o acesso à parte interna da lancha. Minha intenção era tornar mais fácil trabalhar toda a eletrônica no modelo. Veja na foto abaixo que esse acesso superior ocupa quase que toda a extensão do barco.
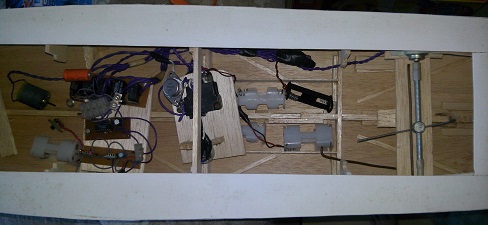
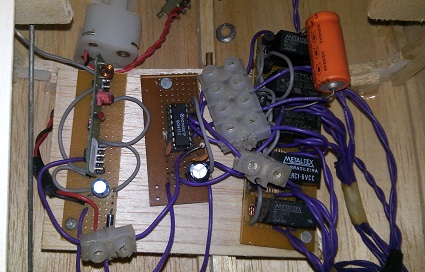
Na foto acima podemos observar da esquerda para a direita: o motor (ainda não instalado na posição correta), o circuito receptor com os 5 relês, o sistema de aceleração da lancha, as pilhas (precisa de 14 pilhas pequenas), o controle do leme. O motor era escovado e as pilhas todas são necessárias para não haver realimentação de nenhuma parte do circuito, afinal é uma montagem caseira.
Porém como a minha entrada no aeromodelismo, decidi “embarcar” a eletrônica desse, na lanchinha. Acompanhe nas imagens a seguir como foi a etapa de construção da lancha em balsa e também as novas adaptações para receber a eletrônica do aeromodelo.
Primeiro fiz a impressão dos moldes da lancha em papel A4 em tamanho real. Colei todos com fita e fui cortando os moldes de papel.
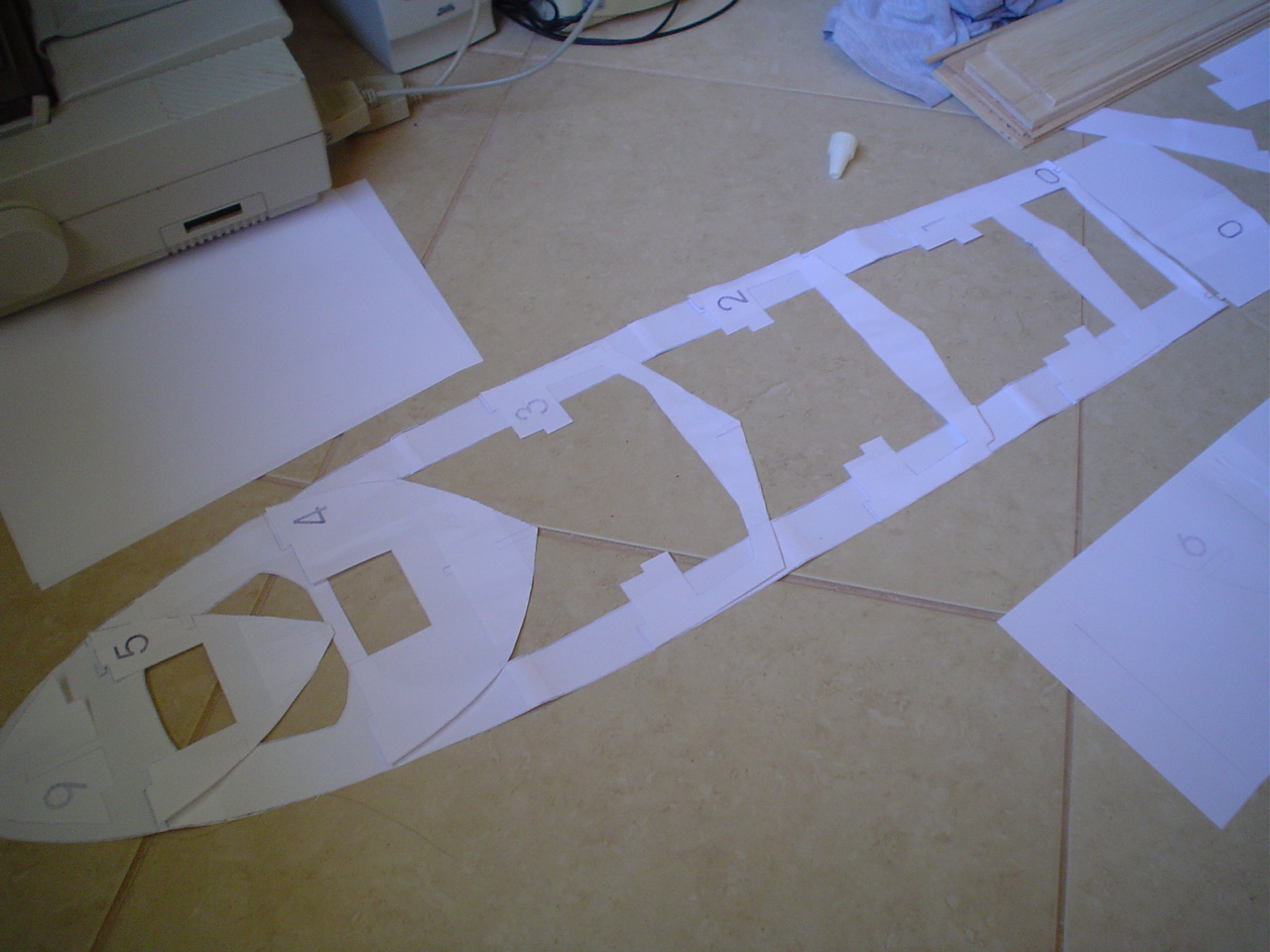
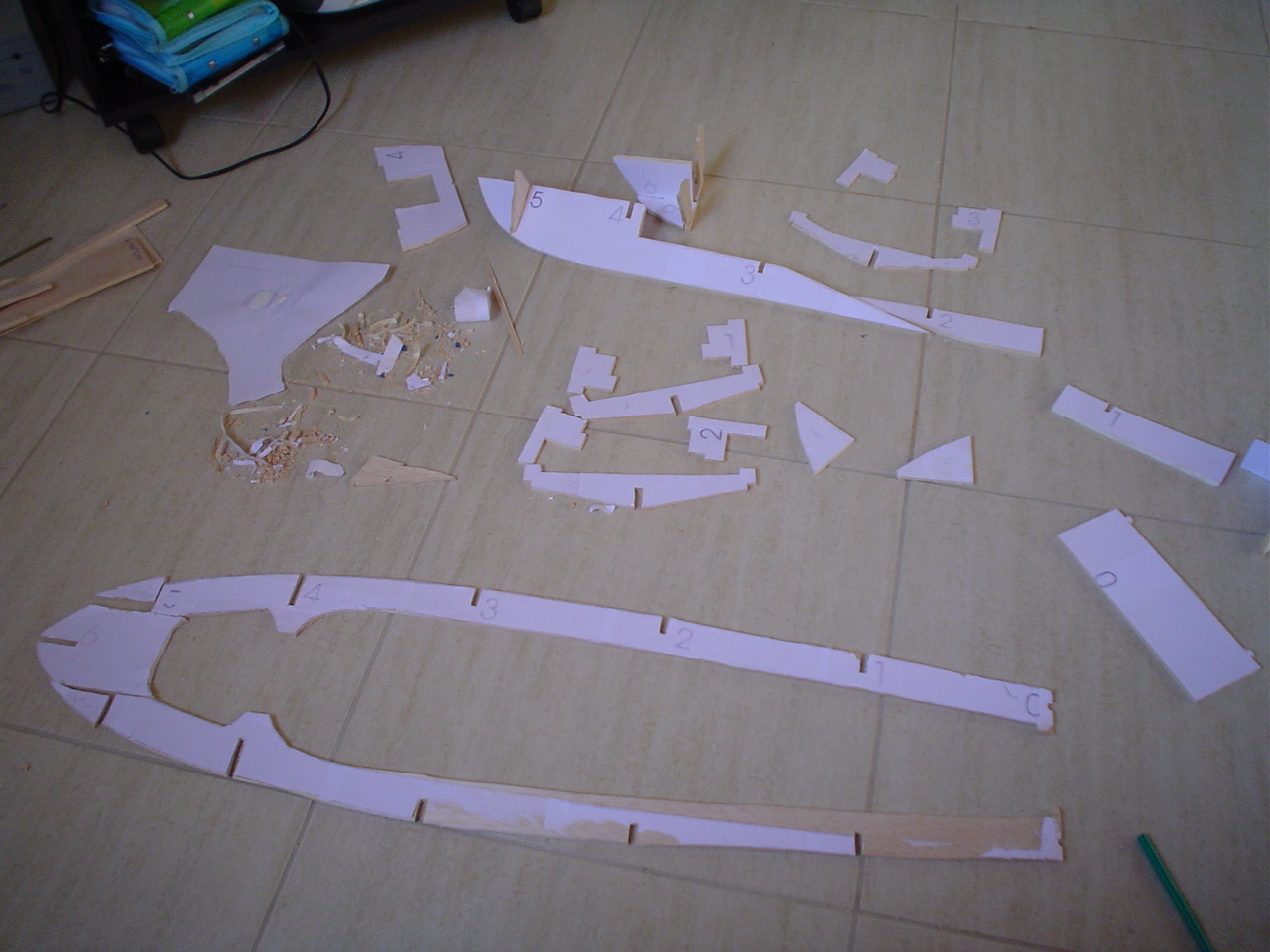
Depois de impressos os papéis, colei os mesmos na balsa para facilitar a precisão do corte. Abaixo as peças de balsa com os papéis colados.
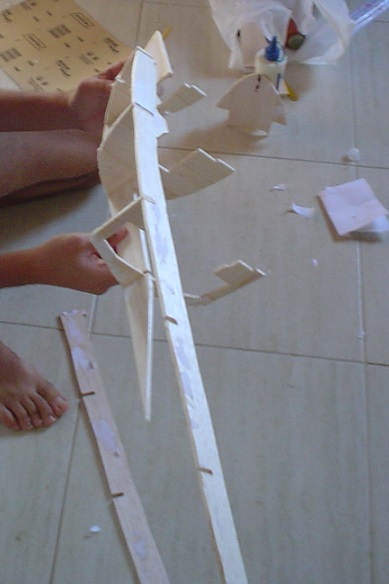
E tá começando a ganhar forma. Essa é a estrutura da proa.
Aqui o trabalho já estava bem adiantado. Já estava parecendo um barco.

Mais alguns pedacinhos de balsa, cola e o interior vai tomando forma.
Abaixo podemos ver a estrutura interna da proa. Nas imagens seguintes essa parte será fechada por cima.

Mais uma.

Aqui já estava com o convés encaixado. Mas ainda faltam uns pedacinhos de balsa para fechar tudo.

Tá perto do final. Aqui a estrutura interna já finalizada. Coloquei mais alguns reforços de balsa que não estavam no projeto original.

E mais 1 foto por outro ângulo.

Agora já está toda fechada. Faltando lixar algumas coisas.

E olha o tamanho!

Antes dela ficar branca como na foto abaixo, passei 3 mãos de seladora de madeira e depois uma base branca. Abaixo as partes em amarelo são mais acabamentos em massa.

Preparando para a pintura.



Algumas curiosidades do projeto inicial
Na segunda foto desse post é possível ver mais detalhes desse projeto inicial. Vou colocar novamente ela aqui embaixo:
O controle do leme era um parafuso onde em uma ponta instalei um motor. Na outra ponta um rolamento de skate para fazer o parafuso girar livremente. Uma porca corre de um lado para o outro fazendo o leme se movimentar. Agora tem um servo de modelismo.
No projeto inicial tinha optado por não fazer o barco ir para trás. Assim usei 2 canais para acelerar e desacelerar. Fiz um projeto de um reostato cujo potenciômetro é movimentado por uma caixa de redução (uma gambiarra bem feita ehehehhehe). Assim ao girar o motor nos sentidos horário e anti-horário, acelerava ou desacelerava a lancha.
O receptor e transmissor usei como base as placas da Telecontrolli.com. O legal é que elas já são sincronizadas TX com RX. Para dar o número de canais necessários para o projeto fiz uso do circuito integrado Motorola MC145026 e MC145027. Eles são encoder e decoder perfeitos. O trem de pulsos do transmissor é recebido e identificado pelo receptor acionando uma das saídas desse.
Na imagem abaixo podemos ver da esquerda para a direita: módulo receptor (Telecontrolli), C.I. decoder da Motorola, relês usados para: acelerar, desacelerar, virar para a esquerda e direita. O último relê foi usado para cortar a aceleração no caso de perda do sinal do transmissor e não perder a lancha. O alcance máximo ficou em cerca de 50 metros sem barreira nenhuma. Um problema que verifiquei é que quanto maior a distância maior é a latência no comando.
Ainda falando em mais detalhes do encoder e decoder da Telecontrolli, veja na imagem abaixo o aspecto interno do transmissor. Usei uma caixa do tipo Patola com 4 push-buttons. A alimentação ficou bem simples já que o módulo funciona bem com 3 Volts (alimentação indicada pelo fabricante). A antena foi montada em função do indicado pela fabricante do módulo TX.

Na imagem abaixo fica mais claro o painel do transmissor com os push-buttons. Coloquei um LED vermelho no centro que acende ao ligar a chave tipo alavanca na parte superior.
